Research on Integrated Road Dynamic Recognition and Path Planning of Intelligent Vehicles Based on Reinforcement Learning
DOI:
https://doi.org/10.62677/IJETAA.2603145Keywords:
Reinforcement learning, Multimodal perception path planning, Intelligent vehicles, End-to-end TrainingAbstract
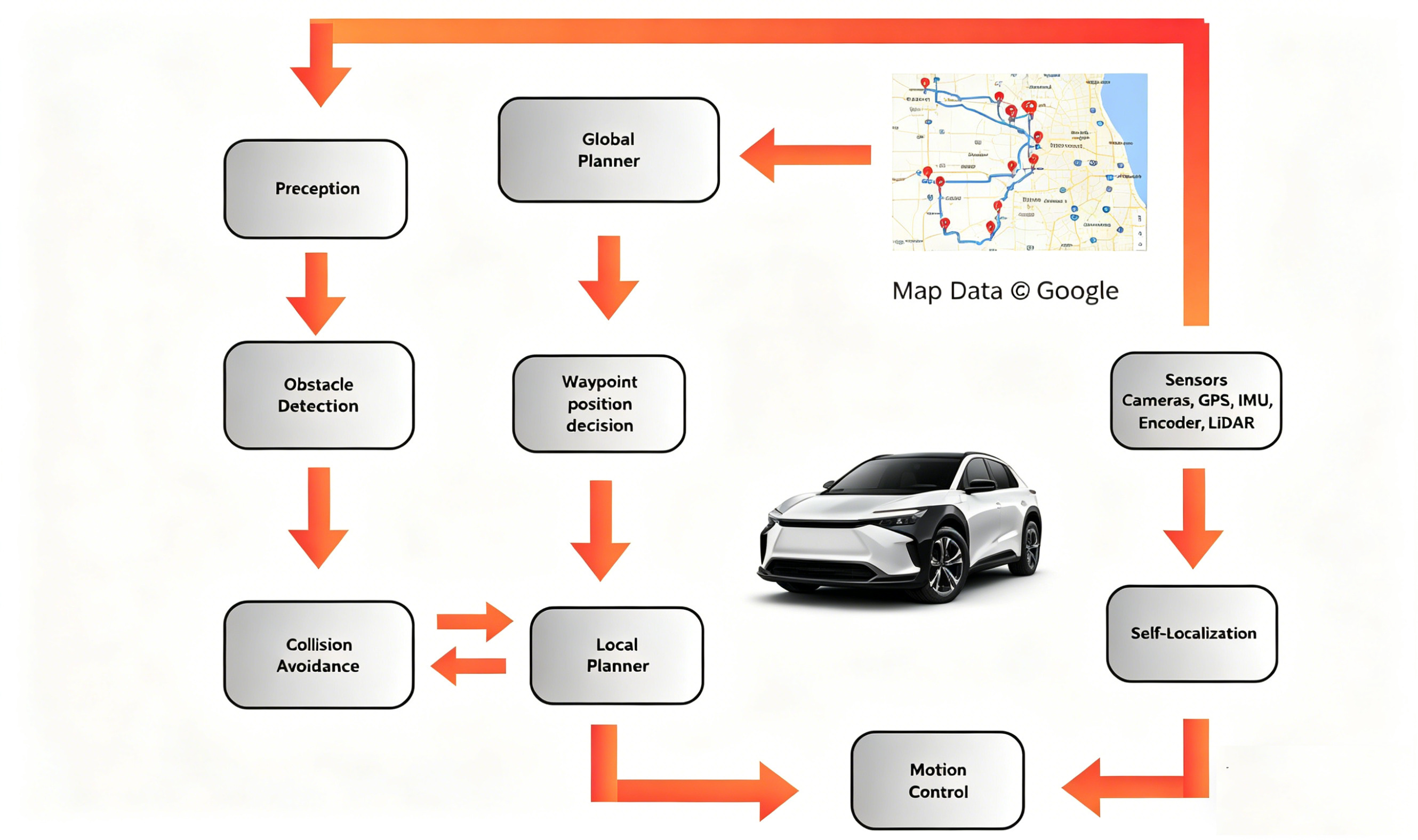
The integrated research on intelligent vehicles in road dynamic recognition and path planning is based on reinforcement learning. In complex urban scenarios, intelligent vehicles face the core bottleneck problem of "disconnection between perception and decision-making, and lagging response". This paper focuses on this issue and proposes an integrated framework of "lightweight reinforcement learning path planning integrating multi-modal perception". Before that, it first analyzes the current research status and mainstream algorithms of intelligent vehicle path planning. Thus, the limitations of the current separated architecture in highly dynamic traffic environments are pointed out. In response to this limitation, this paper designs a synchronous-alignment module that can be trained end-to-end, enabling multi-source heterogeneous data such as cameras, lidars, and millimeter-wave radars to be efficiently compressed into a unified and compact state vector while retaining key interaction information. In addition, a reinforcement learning state-action-reward space for dynamic traffic flow was constructed, and the dual-objective reward function of safety and efficiency was embedded in it, thereby achieving online collaborative optimization of road dynamic recognition and path planning. The algorithm development was completed on mainstream deep learning frameworks, and then the system was verified on the CARLA/SUMO high-fidelity simulation platform and in real vehicle environments. The experimental results show that the proposed scheme is much better than the traditional separated A*/Dijkstra and single-modal RL baseline in core indicators such as navigation success rate, average travel time, and collision rate. Moreover, it reduces the number of model parameters by 42% and keeps the single-step reasoning delay within 50ms. It fully meets the dual requirements of real-time performance and robustness in the complex urban environment. This research achievement not only provides a highly adaptable and easily deployable end-to-end navigation solution for intelligent vehicles, but also offers theoretical basis and engineering practice paradigms for the deep integration of multimodal perception and reinforcement learning in the field of autonomous driving.
Downloads
References
China Intelligent Connected Vehicle Industry Innovation Alliance (CAICV), "Annual report on intelligent connected vehicle industry development," Beijing, China, 2023. [Online]. Available: View on caicv.org.cn.
China Society of Automotive Engineers (CSAE) and National Intelligent and Connected Vehicle Innovation Center (NICVIC), "China intelligent and connected vehicle industry development report (2022)," Industry Report, Dedao, 2022. [Online]. Available: View on dedao.cn.
Z. Li, "A hierarchical autonomous driving framework combining reinforcement learning and imitation learning," in Proc. 2021 Int. Conf. Computer Engineering and Application (ICCEA), Kunming, China, 2021, pp. 395–400, doi: 10.1109/ICCEA53728.2021.00084.
Z. Yu, F. Sun, X. Lu, and Y. Song, "Overview of research on 3D path planning methods for rotor UAV," in Proc. 2021 Int. Conf. Electronics, Circuits and Information Engineering (ECIE), Zhengzhou, China, 2021, pp. 368–371, doi: 10.1109/ECIE52353.2021.00081.
D. Zhu, B. Zhou, and S. Yang, "A novel algorithm of multi-AUV task assignment and path planning based on biologically inspired neural network map," IEEE Trans. Intell. Veh., pp. 1–1, 2020, doi: 10.1109/TIV.2020.3029369.
K. Ishihara, A. Kanervisto, J. Miura, and V. Hautamaki, "Multi-task learning with attention for end-to-end autonomous driving," in Proc. 2021 IEEE/CVF Conf. Computer Vision and Pattern Recognition Workshops (CVPRW), Nashville, TN, USA, 2021, pp. 2896–2905, doi: 10.1109/CVPRW53098.2021.00325.
Y. Lin, J. McPhee, and N. L. Azad, "Comparison of deep reinforcement learning and model predictive control for adaptive cruise control," IEEE Trans. Intell. Veh., vol. 6, no. 2, pp. 221–231, Jun. 2021, doi: 10.1109/TIV.2020.3012947.
G. Liu, S. Wang, J. Yu, and J. Yin, "A survey on multimodal dialogue systems: Recent advances and new frontiers," in Proc. 2022 5th Int. Conf. Advanced Electronic Materials, Computers and Software Engineering (AEMCSE), Wuhan, China, 2022, pp. 845–853, doi: 10.1109/AEMCSE55572.2022.00170.
A. AbdElmoniem, A. Osama, M. Abdelaziz, and S. A. Maged, "A path-tracking algorithm using predictive Stanley lateral controller," Int. J. Adv. Robot. Syst., vol. 17, no. 6, 2020, doi: 10.1177/1729881420974852.
S. Ganesan and S. K. Natarajan, "A novel directional sampling-based path planning algorithm for ambient intelligence navigation in autonomous mobile robots," J. Ambient Intell. Smart Environ., vol. 15, no. 3, pp. 269–284, 2023, doi: 10.3233/AIS-220292.
J. Hang and C. Zhang, "Path planning and decision model for intelligent robots based on reinforcement learning," in Proc. 2025 Int. Conf. Electrical Drives, Power Electronics & Engineering (EDPEE), Athens, Greece, 2025, pp. 418–423, doi: 10.1109/EDPEE65754.2025.00078.
Y. Shi, "Research on path planning methods of intelligent inspection robots based on deep reinforcement learning," in Proc. 2024 4th Asia-Pacific Conf. Communications Technology and Computer Science (ACCTCS), Shenyang, China, 2024, pp. 394–398, doi: 10.1109/ACCTCS61748.2024.00075.
J. Schulman, F. Wolski, P. Dhariwal, A. Radford, and O. Klimov, "Proximal policy optimization algorithms," arXiv preprint arXiv:1707.06347, 2017, doi: 10.48550/arXiv.1707.06347.
W. Xie, W. Sun, G. Liu, and Y. Xu, "Robot intelligent path planning based on reinforcement learning," Modular Machine Tool & Automation Machining Technology, no. 7, pp. 18–22, 2022, doi: 10.13462/j.cnki.mmtamt.2022.07.004.
H. Cheng, H. Zhu, G. Yang, W. Yan, and H. Wang, "A review of deep reinforcement learning and intelligent path planning applications," Modern Computer, no. 21, pp. 5–14, 2022. [Online]. Available: View on CNKI.
China Intelligent Connected Vehicle Industry Innovation Alliance (CAICV), "Intelligent connected vehicle technology roadmap 3.0," Beijing, China, 2023. [Online]. Available: View on caicv.org.cn.
Ministry of Industry and Information Technology of China, "Management guidelines for the access of intelligent connected vehicle manufacturers and products," Beijing, China, 2023. [Online]. Available: View on gov.cn.
Downloads
Published
Issue
Section
Categories
License
Copyright (c) 2026 Xiaoliang Zhou, Joan P. Lazaro (Author)

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
How to Cite